これからロボット農機はどうなっていく? 第一人者に聞く最新事情
2020/10/01



着々と進化しているロボット農機だが、完全自動走行の実現やスマートフードチェーンとの関わりなど、2020年以降どうなって行くのだろう? 本分野の第一人者・北海道大学の野口伸教授が語ってくれた。
無人状態での完全自律走行が
社会実装に向けて検証中
ロボット農機は農水省が設置した「スマート農業の実現に向けた研究会」が設定した農業機械の安全性確保の自動化レベル(概要)で見ると、2018年にはレベル2=使用者の監視下での無人状態での自律走行まで実現しています。その後、直進自動操舵機能を搭載したモデルは国内4メーカーから出揃い、さらにトラクターのみならず、田植機とコンバインにも搭載されるようになりました。
搭載形態も多様化しています。機体としての販売だけでなく、手持ちの農機に後から組み込むことができる後付けシステムも販売されました。このように直進自動操舵機能を搭載したモデルは、今まさに普及期に入っています。

(ここまでのお話は、本記事の2019年版で詳しくご紹介していますので、そちらをお読みください。「無人での完全自律走行」が実用化!? 2020年、スマート農機は大きく進化する)
そして2020年現在、私達は次の目標であるレベル3『無人状態での完全自律走行』の実用化に向けて取り組んでいるところです。その最前線が北海道岩見沢市です。それに先駆けて私達北海道大学は、2019年6月28日から2024年6月30日までの5年間、岩見沢市の農業生産者とNTTグループとで、民官学が連携する体制を確立したことを発表しました。ここでロボット農機の完全自動走行(レベル3)に向けて「高精度測位・位置情報配信方式の検討」を行っているのです。
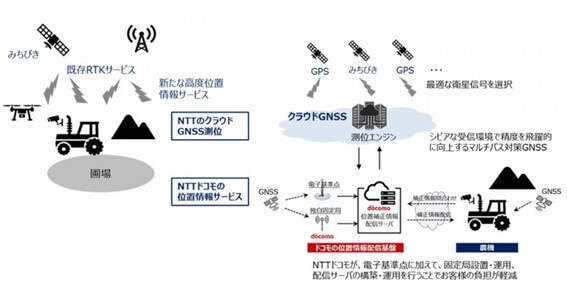
提供:NTTグループ
既に「10km以上離れた場所から複数台のトラクターを遠隔操作する」という技術は確立できています。現在は、それによりどれだけの効果があるのか、という検証を行っている段階。完全自動走行(レベル3)の社会実装に向けた取り組みは着々と進んでいます。
昨年の記事では「圃場間移動の法整備」についてお話しました。技術面でレベル3をクリアしても、作業機が装着された状態で公道を走れないのでは省力化は実現しません。それが昨年、国土交通省が農用トラクターに関わる道路運送車両法の運用を見直し、保安基準に緩和措置が盛り込まれることとなりました。
灯火器類、作業機の幅、最高速度、運転免許、チェーンなどが一定の条件をクリアした場合に限り、作業機を装着・けん引した状態のトラクターの公道走行が可能となりました。これはレベル3ロボット農機の社会実装に向けた前進と言えます。
また、農道管理者が一般交通の用に供しない農道と判断した場合、当該農道は道路交通法の適用を受けず、農道管理者が必要な措置を行うという整理を警察庁がしたことにより、無人農機の圃場間移動も可能になりました。
野菜・果樹・中山間農業に向けた
ロボット農機の開発
SIP第1期(*注)の成果もありロボット農機は着実に進化していますが、レベル3を実現すれば全てが解決するわけではありません。これまで社会実装されたロボット農機の多くは、水稲栽培を対象としたもの。まずは最もインパクトの大きい水稲から進めてきました。
*注:SIPとは内閣府直轄の戦略的イノベーション創造プログラムのこと。府省の枠や旧来分野の枠を超えて、科学技術イノベーションを実現するために創設された。農業分野では、農業のスマート化と農林水産物の高付加価値化の技術革新を実現することで、農家に貢献することを目指している。2019年3月末までの第1期では野口教授がプログラムディレクターを務めた。
一方で、畑作、野菜、果樹を対象にしたロボット農機については、まだ技術開発が必要です。そこでSIP第2期ではキャベツとレタスをメインに、また私の研究室では他の作物を対象とした技術開発を進めています。

提供:野口 伸(北海道大学)
そこで私の研究室の岡本准教授が開発しているのが、かぼちゃ・スイカなどの重量物野菜の収穫ロボットです。野菜の収穫に多くの人手が必要であることは、奇しくもコロナの影響で社会一般に知られることになりましたが、なかでも特に重量物野菜の収穫は大変です。そこを省力化しよう、という狙いです。ハンド付きロボットトラクターと、2台のコンテナロボット(トラクター)の協調作業により、収穫適期にある野菜を傷つけずに選択して収穫します。

提供:野口 伸(北海道大学)
また果樹向けには、北海道のブドウ農園(ワイン用)でロボット化を進めています。トヨタのハイブリッド自動車のリユースを前提にしたユニークなロボット農機です。ハイブリッド自動車は高性能ですから、中古でもバッテリーとモーターだけを使用して農場を20km/日は走ることができます。そのうえモーターを二つ搭載していますから、そのうちの一つを走行用、もう一つを作業用として、作業機の駆動にも使えます。これは便利です。電動走行を想定しているので夜間作業も可能です。
果樹栽培では多様な作業が求められます。まずは草刈、運搬、農薬散布、追肥、防除、生育情報収集などから取り組んでいますが、将来は剪定などもできるようにしたいですね。
スマートフードチェーン
そこで働くロボット農機
SIP第1期では、水稲栽培の生産活動に重点を置いて研究開発と実証を行って来ました。その成果としてロボット農機を実用化し、また農業データ連携基盤(WAGRI)を核にしたデータ駆動型農業の実現に向けた基礎を構築しました。SIP第2期では更に一歩踏み込んで、消費者に食料を届けるまで、つまり加工・流通・販売・消費、それにリサイクルを含めたデータ連携によって、農業生産と食品産業を最適化して行くことを目指しています。これがスマートフードチェーンと呼ばれるものです。

提供:野口 伸(北海道大学)
ロボット農機の開発目的は、大きくは二つあります。一つはデータ駆動型農業の推進。様々なデータを活用することで農業をより効率的にしよう、という狙いです。
もう一つは、自動化・ロボット化。これは省力化を可能にします。SIPが第2期に入って、スマートフードチェーンという言葉が使われるようになっています。農業生産の現場からかけ離れた話題だと捉えてしまいがちですが、データ駆動型農業の適用範囲を拡大した発展版と考えましょう。すると、スマートフードチェーンはデータ駆動型の農業生産と極めて相性が良いことはお分かりいただけるでしょう。
スマートフードシステムでは、ありとあらゆるデータが収集・分析され、生産の現場に生かされることになります。そこで利用できるインフラとして、ローカル版を含めた5Gの整備が進められています。私達も5G・ローカル5G環境下でのロボット農機の遠隔操作の実証を進めていることは、冒頭にお伝えした通りです。
将来は、地域ごとに生育モデルを使って、フィードフォワード方式でシミュレーションしながら生産する、という地域スマート農業の体系を確立する必要があります。それは水稲栽培だけでなく、露地野菜や果樹、それに中山間の農業も含まれます。ロボット農機は、あらゆる農業をデータ駆動型にし、そして省力化することを目指しているのです。
プロフィール
野口伸氏

北海道大学教授。内閣府戦略的イノベーション創造プログラム(SIP)「次世代農林水産業創造技術」プログラムディレクターを務める。食料生産システムのロボット化やICTに関わる研究に取り組んでいる。
文:川島礼二郎