



最新技術でコストダウンに挑む「キャベツ自動収穫機」
2018.08.28

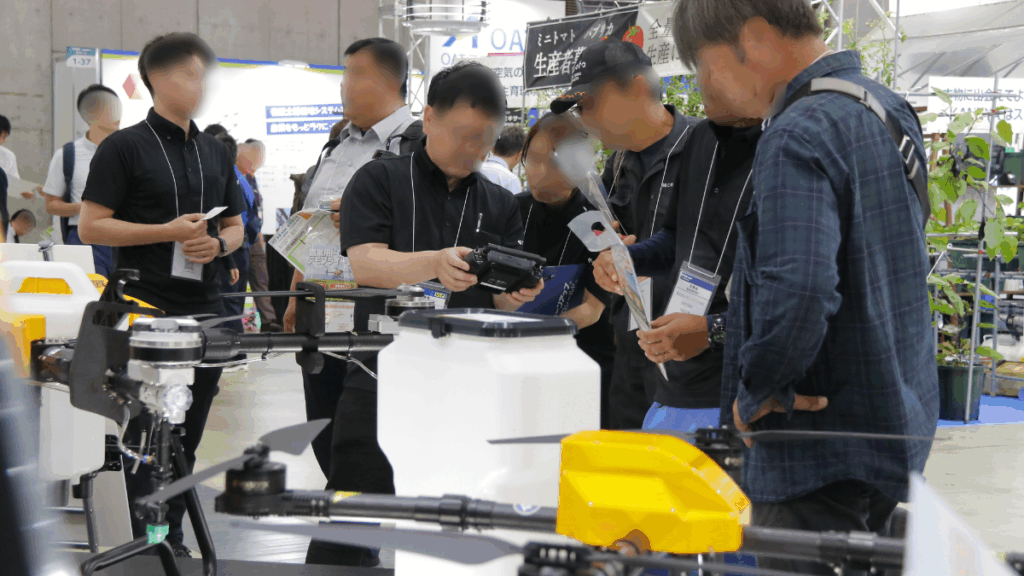
GPECの「ロボット農機」に関するセミナーでは、キャベツの自動収穫機の研究開発についての発表があった。ディープラーニングやレーザーなどの最新技術を駆使して、実際に現場で使えるようコストダウンにも取り組んでいる。
人間には気にならないズレも
ロボットには大きな誤差に
2018年7月11日~13日、東京ビッグサイトで「施設園芸・植物工場展 2018(GPEC)」が開催された。アグリジャーナル編集部は、会場内を徹底取材。今回は、特設のセミナー会場で行われた「GPEC主催者セミナー」の中から、自動収獲ロボットに関してのセミナーの模様を紹介する。
登壇したのは、立命館大学 理工学部 電気電子工学科の深尾 隆則 教授。深尾氏は、露地野菜などの自動収穫ロボットの研究開発を行っており、その成果を発表した。

深尾氏は、露地野菜の集荷までのプロセスの中で、さまざまなロボット農機について研究している。今回のセミナーの中では、キャベツの自動収獲機について詳しい解説があった。
畑のキャベツは一見まっすぐ植えられているように見えるが、実際には直線に並んでいるわけではない。人間の手作業であれば気にならないズレでも、ロボットで収獲するためには誤差数cmレベルでの正確な位置を検出する必要がある。今回紹介された自動収穫機は、ディープラーニング技術によってキャベツを検出。そのほか、収獲のための経路の生成や追従制御、土壌面検出、収獲部の高さ制御などで自動収獲を実現しているという。

深尾氏が研究の中で念頭に置いていることの1つが、コスト面。どんなに高機能なロボットを開発しても、高価すぎて農家の現場に導入してもらえなければ、元も子もない。現在は数百万円かかる機能のものを、数十万円で購入できるようにすることを目指している。
そのために、キャベツの自動収穫機でも使われているディープラーニング技術や、LiDAR(ライダー)と呼ばれるレーザー技術、量産化が進んで安価になった小型カメラなどを組み合わせて、コストダウンに取り組んでいるという。
DATA



















RANKING





MAGAZINE

PRESS
RANKING




MAGAZINE
PRESS